
En el mundo de la horticultura, algunas vides son especialmente llamativas. A medida que crecen, los zarcillos leñosos pueden rodear obstáculos con suficiente fuerza como para derribar vallas y árboles.
Inspirados por la tenacidad retorcida de las enredaderas, ingenieros del MIT y la Universidad de Stanford han desarrollado una pinza robótica que puede serpentear y levantar una variedad de objetos e incluso personas, ofreciendo un enfoque más suave que los diseños de pinzas convencionales.
El nuevo robot consiste en una caja presurizada desde la cual se inflan y crecen largos tubos en forma de enredaderas. A medida que se extienden, las enredaderas se tuercen y enrollan alrededor del objeto antes de continuar hacia la caja, donde sus puntas se sujetan automáticamente en su lugar y se enrollan mecánicamente para levantar suavemente el objeto con un agarre similar a una honda.
Los investigadores visualizan aplicaciones que van desde la cosecha agrícola hasta la carga y descarga de cargas pesadas. A corto plazo, están explorando usos en el cuidado de personas mayores, como ayudar a levantar a una persona de la cama de forma segura. A menudo, en entornos de enfermería y rehabilitación, este proceso de transferencia se realiza con un elevador de pacientes, lo que requiere que un cuidador coloque a la persona sobre una sábana similar a una hamaca que se puede enganchar al dispositivo y levantar. Este paso manual es innecesario con el sistema robótico.
“Sacar a una persona de la cama es una de las tareas más agotadoras físicamente que realiza un cuidador”, dice Kentaro Barhydt, candidato a doctorado en el Departamento de Ingeniería Mecánica del MIT y uno de los autores principales de un estudio. papel en el trabajo. “Este tipo de robot puede ayudar a aliviar al cuidador y puede ser más suave y cómodo para el paciente”.
La clave del sistema, cuyo diseño fue desarrollado por el laboratorio del profesor Harry Asada en el MIT y el laboratorio de la profesora Allison Okamura en Stanford, es que combina acciones de “bucle abierto” y “bucle cerrado”. En una configuración de circuito abierto, una enredadera robótica puede crecer y girar alrededor de un objeto, incluso excavar debajo de alguien que está acostado en una cama. Luego puede seguir creciendo hacia su base y fijarse a un cabrestante, creando un circuito cerrado que se puede retraer para levantar el objeto.
“La gente podría suponer que para agarrar algo, simplemente extiende la mano y agarralo”, dice Barhydt. “Pero hay diferentes etapas, como posicionamiento y retención. Al transformarnos entre circuitos abiertos y cerrados, podemos alcanzar nuevos niveles de rendimiento aprovechando las ventajas de ambas formas para sus respectivas etapas”.
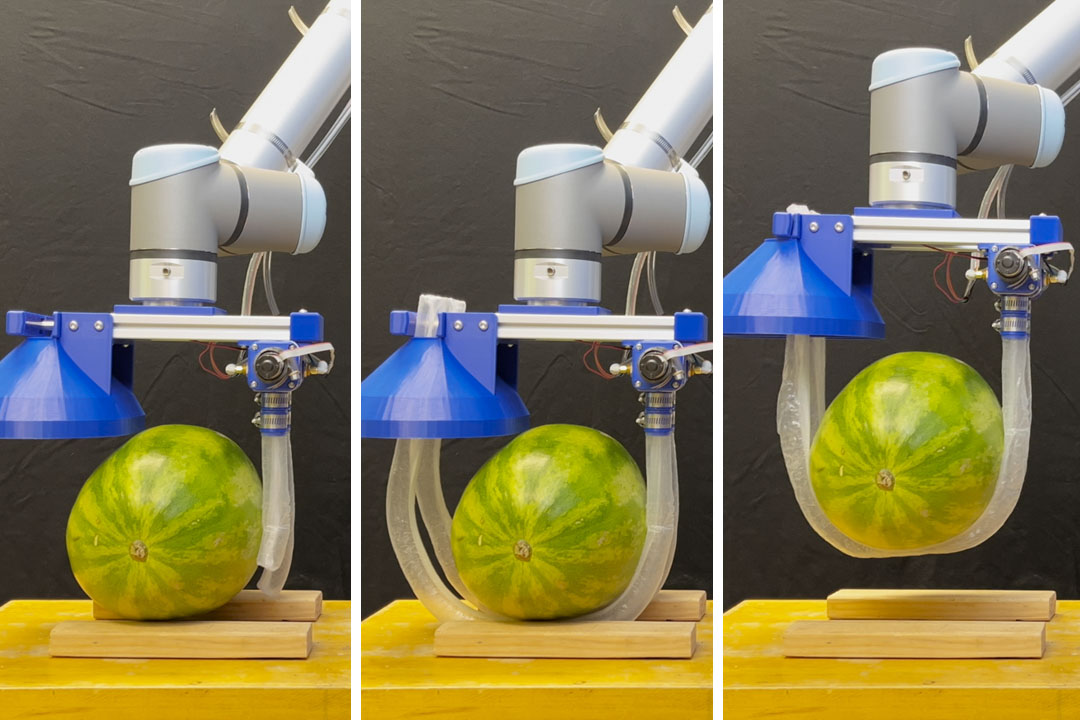
Si bien el diseño del equipo fue motivado inicialmente por los desafíos del cuidado de personas mayores, también puede adaptarse a otras tareas de agarre. Se ha acoplado una versión más pequeña a un brazo robótico comercial para levantar una variedad de objetos pesados y frágiles, entre ellos una sandía, un jarrón de vidrio y una pesa rusa. Las enredaderas también pueden serpentear a través de un contenedor desordenado para sacar el objeto deseado.
“Creemos que este tipo de diseño de robot se puede adaptar a muchas aplicaciones”, afirma Barhydt. “También estamos pensando en aplicar esto a la industria pesada y a cosas como la automatización del funcionamiento de grúas en puertos y almacenes”.
Publicado originalmente en technologyreview.com el 24 de febrero de 2026.
Ver fuente original



